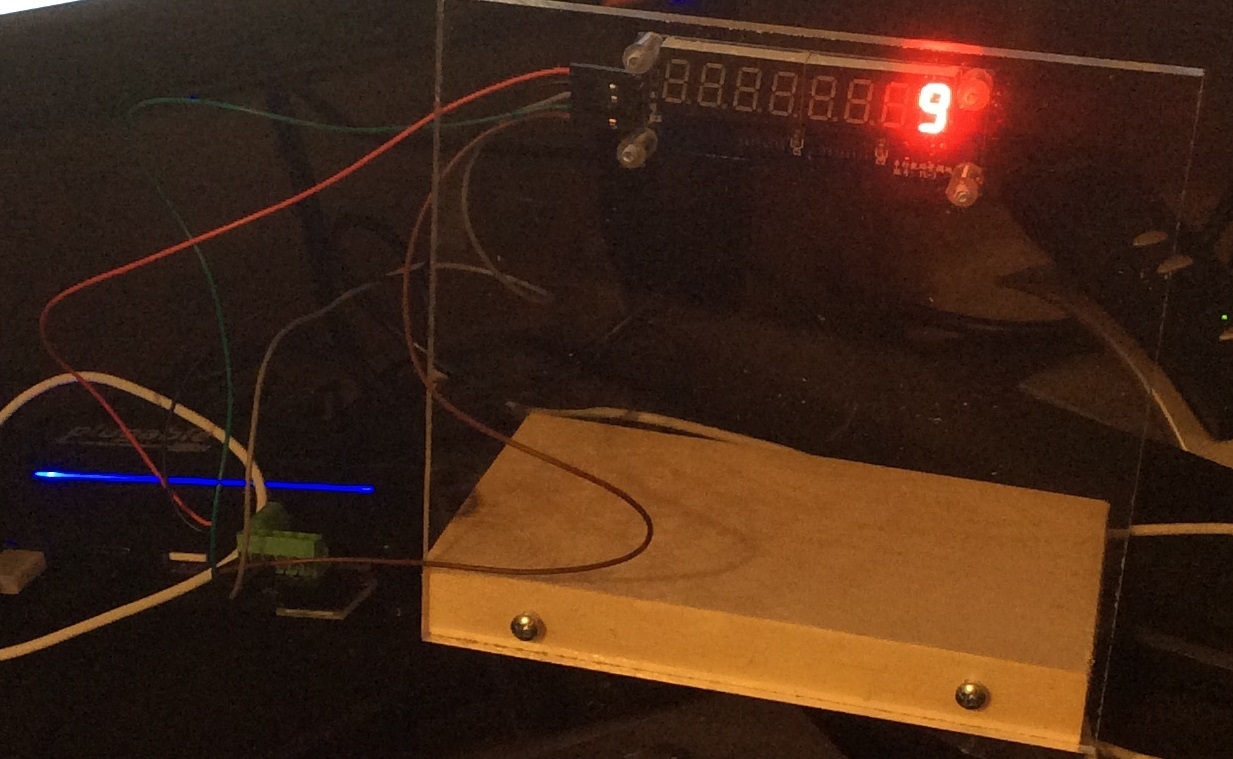
I decided to build a display for my desk at work that shows my current bug count using the 7 digit segment display that I purchased from DealExtreme. I do not want an Arduino hanging off a USB cable cluttering my desk (or draining my wallet). Enter the Digispark. Designed and produced by a local Portland company, the Digispark is an ATtiny85 that fits directly into a USB port.
On the computer side, A python program runs on my desktop. It queries Trac every once in a while and if the bug count changes, sends a message to the display.

Code for the Digispark:
#include <DigiUSB.h>
#define latch 0
#define clock 1
#define data 2
#define kDigitCount 8
char gDisplayBuffer[kDigitCount+1];
void setup()
{
pinMode(latch, OUTPUT);
pinMode(clock, OUTPUT);
pinMode(data, OUTPUT);
memset(gDisplayBuffer, ' ', kDigitCount);
writeToDisplay(true);
DigiUSB.begin(); // open DigiUSB
}
void writeDigit(int digit, char inValue)
{
byte value = 0;
byte bitsToSend = 0;
bitSet(bitsToSend, digit);
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST, bitsToSend);
switch (inValue)
{
case '.': value = B01111111; break;
case '1': value = B11111001; break;
case '2': value = B10100100; break;
case '3': value = B10110000; break;
case '4': value = B10011001; break;
case '5': value = B10010010; break;
case '6': value = B10000011; break;
case '7': value = B11111000; break;
case '8': value = B10000000; break;
case '9': value = B10010000; break;
case '0': value = B11000000; break;
case 'H': value = B10001001; break;
case 'i': value = B11111011; break;
default:
case ' ': value = B11111111; break;
}
shiftOut(data,clock,MSBFIRST,value);
digitalWrite(latch,HIGH);
}
void writeToDisplay(bool inOveride)
{
for (int i = 0 ; i < kDigitCount ; i++)
{
if (' ' != gDisplayBuffer[i] || inOveride)
writeDigit(i, gDisplayBuffer[i]);
}
}
int readBytesUntil(char delim, char* outBuffer, int inMaxSize)
{
int bytesRead = 0;
int lastRead = 0;
while ( bytesRead < inMaxSize )
{
if (DigiUSB.available())
{
lastRead = DigiUSB.read();
if ('\n' == lastRead)
break;
outBuffer[bytesRead] = lastRead;
++bytesRead;
}
// refresh the usb port for 10 milliseconds
DigiUSB.delay(10);
}
outBuffer[bytesRead] = 0;
return bytesRead;
}
void loop()
{
char cmdBuffer[16];
if (DigiUSB.available())
{
memset(cmdBuffer, ' ', 16);
int iBytes = readBytesUntil('\n', cmdBuffer, 12);
cmdBuffer[iBytes] = 0;
if (!strncmp(cmdBuffer, "SET ", 4))
{
if (12 != strlen(cmdBuffer))
DigiUSB.println("ERR");
else
memcpy(gDisplayBuffer, &cmdBuffer[4], kDigitCount);
}
else if (!strncmp(cmdBuffer, "CLR", 3))
{
memcpy(gDisplayBuffer, " ", kDigitCount);
writeToDisplay(true);
}
}
writeToDisplay(false);
DigiUSB.refresh();
}
The Python code:
'''
The Windows (or desktop) software that periodically gets the bug
count from TRAC and sends it to the 8 digit display.
'''
import urllib
import time
from arduino.usbdevice import ArduinoUsbDevice
kTracUrl = "http://trac/report?asc=1&format=csv"
################################################################################
class TracAggregation:
def __init__(self):
self.m_BugTickets = 0
def incrementBugs(self):
self.m_BugTickets += 1
def totalBugs(self):
return self.m_BugTickets
def __str__(self):
return str(self.m_BugTickets)
################################################################################
class TracEntry:
def __init__(self):
self.m_Ticket = None
self.m_Summary = None
self.m_Type = None
self.m_Priority = None
self.m_Milestone = None
################################################################################
def parseLine(inLine):
tokens = inLine.split(',')
oEntry = TracEntry()
# change for your customized Trac query here
oEntry.m_Ticket = tokens[0]
oEntry.m_Summary = tokens[1]
oEntry.m_Type = tokens[4]
oEntry.m_Priority = tokens[5]
oEntry.m_Milestone = tokens[6]
return oEntry
################################################################################
def parseTracData(inData):
entryList = []
lineList = inData.splitlines()
for line in lineList[1:]: # skip the header
try:
oEntry = parseLine(line)
entryList.append(oEntry)
except:
pass
return entryList
################################################################################
def aggregateTracData(parsedData, bExcludeBacklog=True):
oData = TracAggregation()
for oEntry in parsedData:
if "Bug" == oEntry.m_Type:
if bExcludeBacklog and "Backlog" != oEntry.m_Milestone:
oData.incrementBugs()
elif not bExcludeBacklog:
oData.incrementBugs()
return oData
################################################################################
def getTracData(url=kTracUrl):
try:
tracConnection = urllib.urlopen(url)
tracData = tracConnection.read()
tracConnection.close()
except Exception as e:
print(e)
return (False, None)
parsedData = parseTracData(tracData)
aggregatedData = aggregateTracData(parsedData)
return (True, aggregatedData)
################################################################################
def sendToDisplay(inMessage):
try:
theDevice = ArduinoUsbDevice(idVendor=0x16c0, idProduct=0x05df)
except:
return False
for c in "SET ":
theDevice.write(ord(c))
for c in inMessage:
theDevice.write(ord(c))
return True
################################################################################
if __name__ == "__main__":
lastTotalBugs = 0
while (True):
(ok, tracData) = getTracData()
if ok and lastTotalBugs != tracData.totalBugs():
displayMessage = str(tracData.totalBugs()).rjust(8, ' ')
lastTotalBugs = tracData.totalBugs()
# only send the new bug count if it changed
sendToDisplay(displayMessage)
time.sleep(60)




 (Amazon Link)
(Amazon Link)