My oldest child is moving into middle school. He is very creative and expressed a small interest in doing some robotics. He’s enjoyed the ozobot since it was purchased.
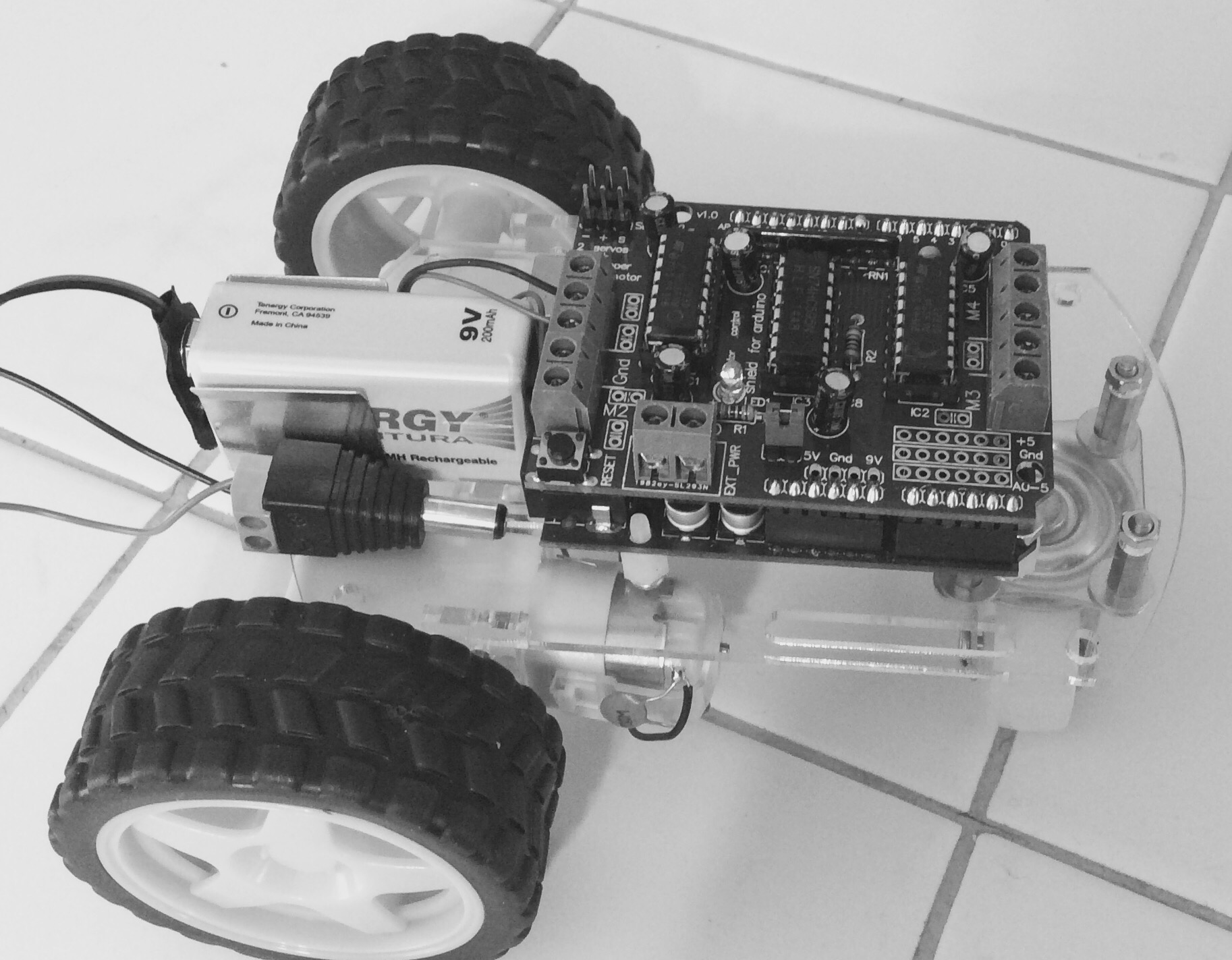
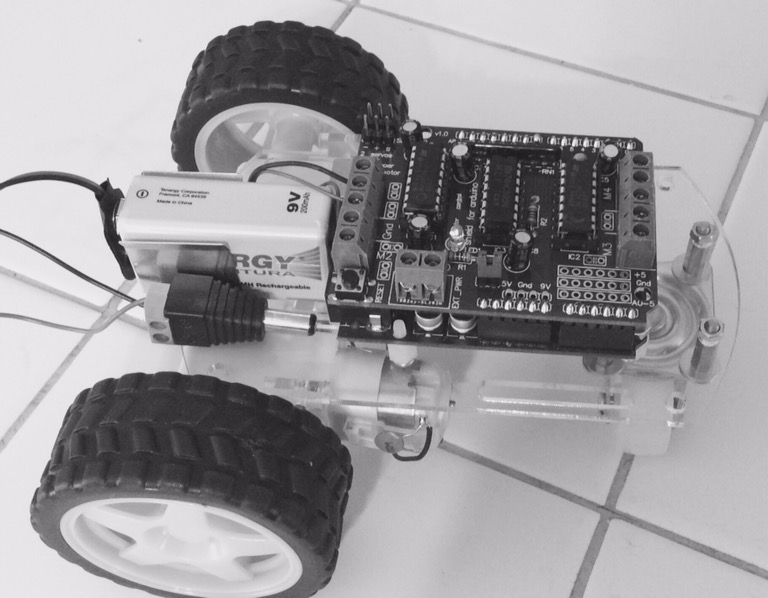
I set out to put together something cheap (in case he loses interest, but still functional and expandable at a high level). I found a cheap (like usd$9) acrylic robot on Aliexpress, an off brand Arduino UNO, and a SainSmart motor shield. The total for this project is so far under $30. Sensor and LED bling have not yet been added. I have piles of ultrasonic and infrared sensors already. I’m thinking of adding a few perimeter contact switches and that would complete it.