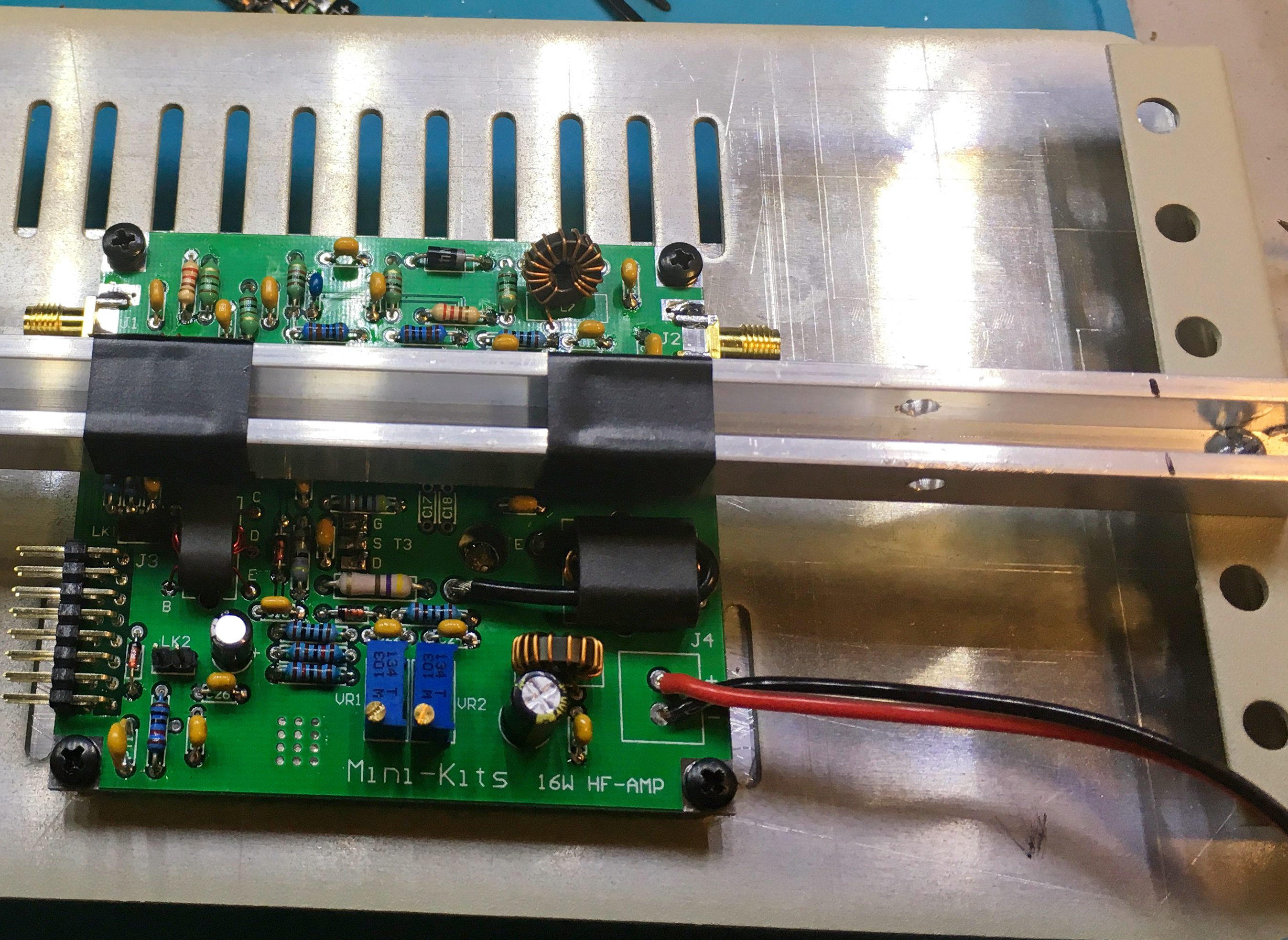
After the pcb was finished (minus the power MOSFET), the heat sink needs to be drilled and tapped for to mount the standoffs and the MOSFET pair. Source a 150x80mm heatsink on Amazn. The bottom is at least a quarter inch thick. I’m using M3-0.5 standoffs for all pcb mounting. It’s actually pretty hard to find a 2.5mm drill bit. I tried a metric tap set from Dubro, but snapped the bit in the first minute. I ended up purchasing a 40 pack (cheap imported bits). These bits performed way better.