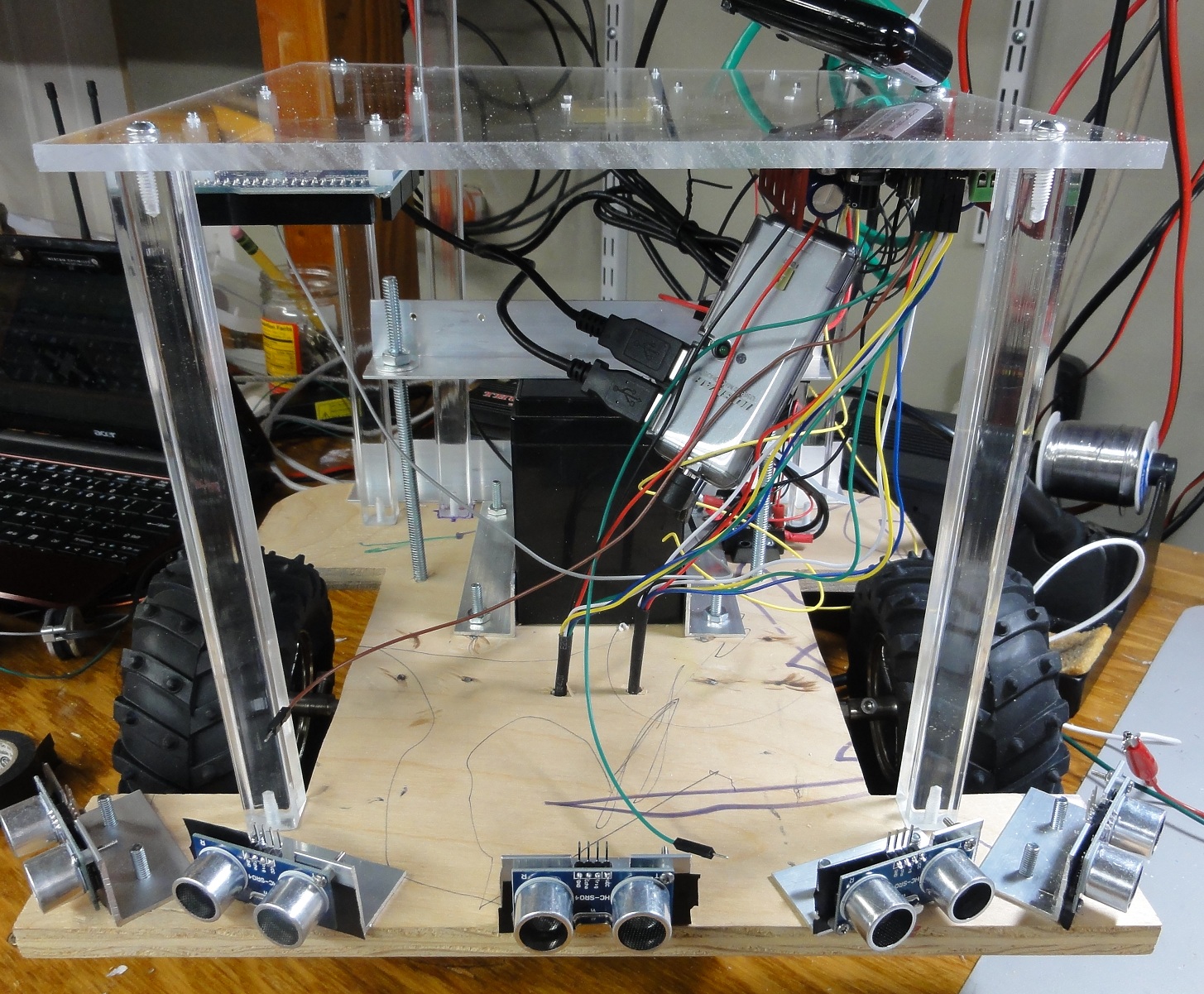
Spent a little bit of time writing python code to talk to the RoboClaw. After I got the MUX mode set correct for UART1, I could not figure out why a loop-back test was not working. If in doubt, read the reference document. It turns out I had was using the right pins on the wrong expansion header. Resoldered the serial lines for UART1 and UART2 back to P9…and it works. Personally, I think it’s even simpler to write serial byte commands in Python than using the Arduino. It should only take a few hours to come up with a simple state machine that can use the five front-facing distance sensors to do obstacle detection.
Otherwise, been a busy day buying The Boy a new bike, acquiring construction tools at the Home Despot for a project this May, and cleaning the bbq.