I’ve started a new, more ambitious robotics project. This robot is targeted for outdoor use in semi-controlled settings, but with much larger range. I’ve been conceptualizing this for about six months now.
The goal is to build a platform that:
- can be used outside on pavement
- provides a wide array of sensors to navigate complex environments
- has enough computation power to play with OpenCV
- can be internet connected for rapid development (aka BeagleBone, wifi, and Python)
Using this platform I would like to play with:
- Outdoor navigation and obstacle avoidance
- OpenCV
- GPS and pre-planning algorithms
- “mission control” software
- infrastructure management
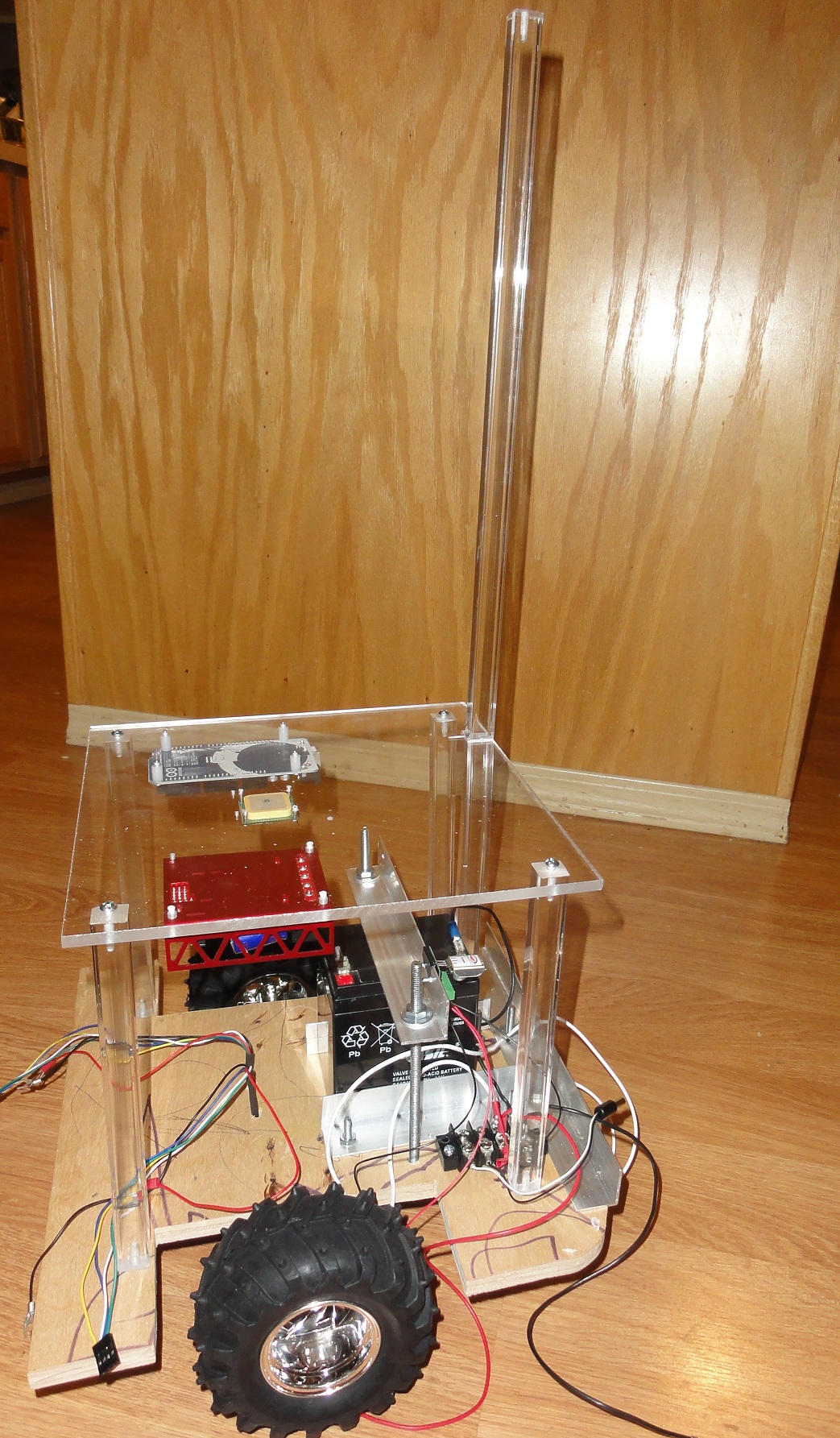
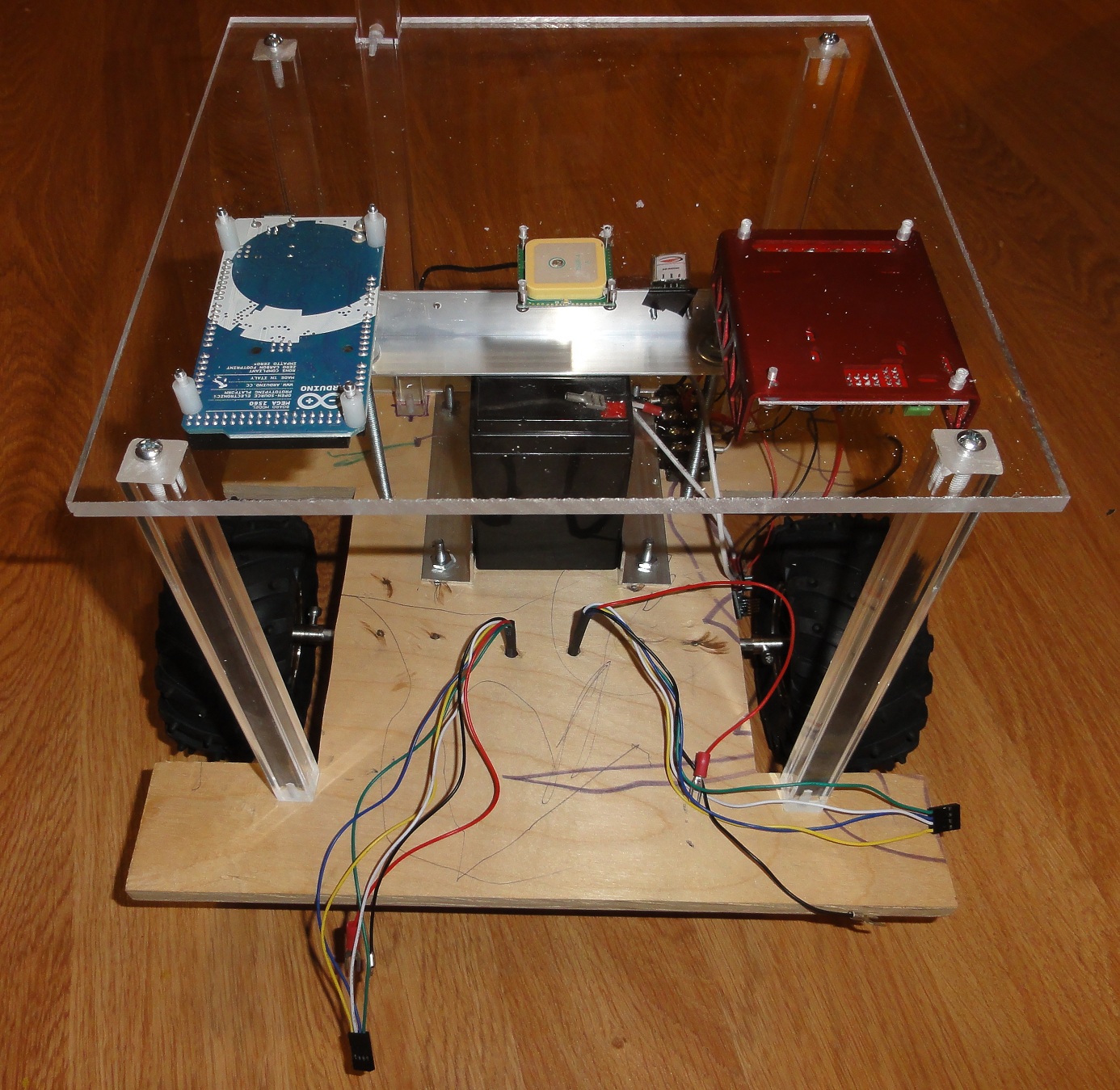
In the near term it will be built upon:
- Arduino Mega
- BeagleBone
- RoboClaw for motor control
- Pololu 37D motors with encoders
- LS20031 GPS
- CH robotics UM6 IMU
- Adafruit TTL Camera
- HC-SR04 Ultrasound sensors
- IOGear GWU627 for wifi
In the longer term:
- XBee Pro for long-range “missions”
- Solar panel charging
- “measurementation” sensor packages