P8 and P9: Confusion and Progress
Spent a little bit of time writing python code to talk to the RoboClaw. After I got the MUX mode set correct for UART1, I could not figure out why a loop-back test was not working. If in doubt, read the reference document. It turns out I had was using the right pins on the wrong expansion header. Resoldered the serial lines for UART1 and UART2 back to P9…and it works. Personally, I think it’s even simpler to write serial byte commands in Python than using the Arduino. It should only take a few hours to come up with a simple state machine that can use the five front-facing distance sensors to do obstacle detection.
Otherwise, been a busy day buying The Boy a new bike, acquiring construction tools at the Home Despot for a project this May, and cleaning the bbq.
Weekend progress
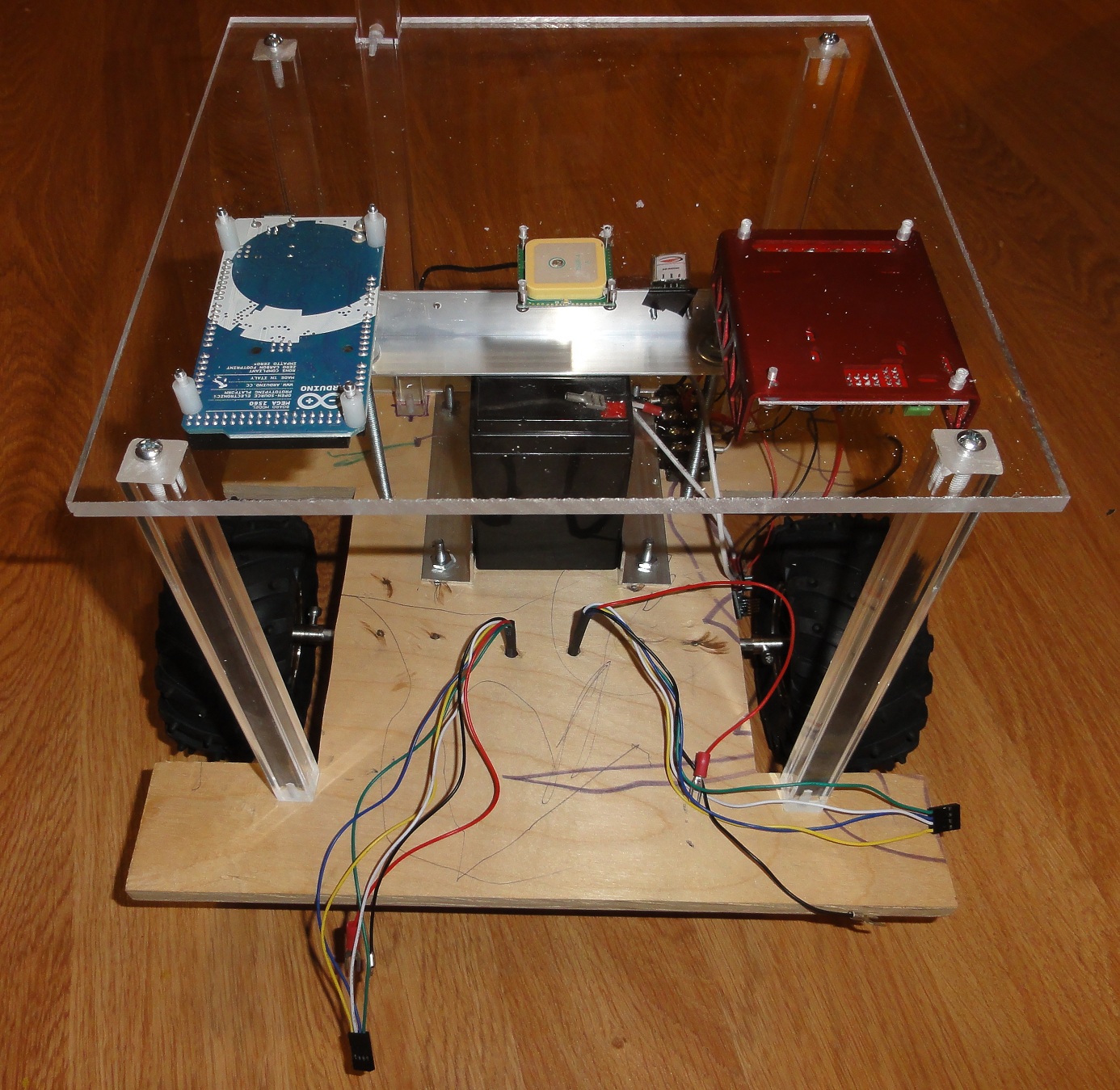
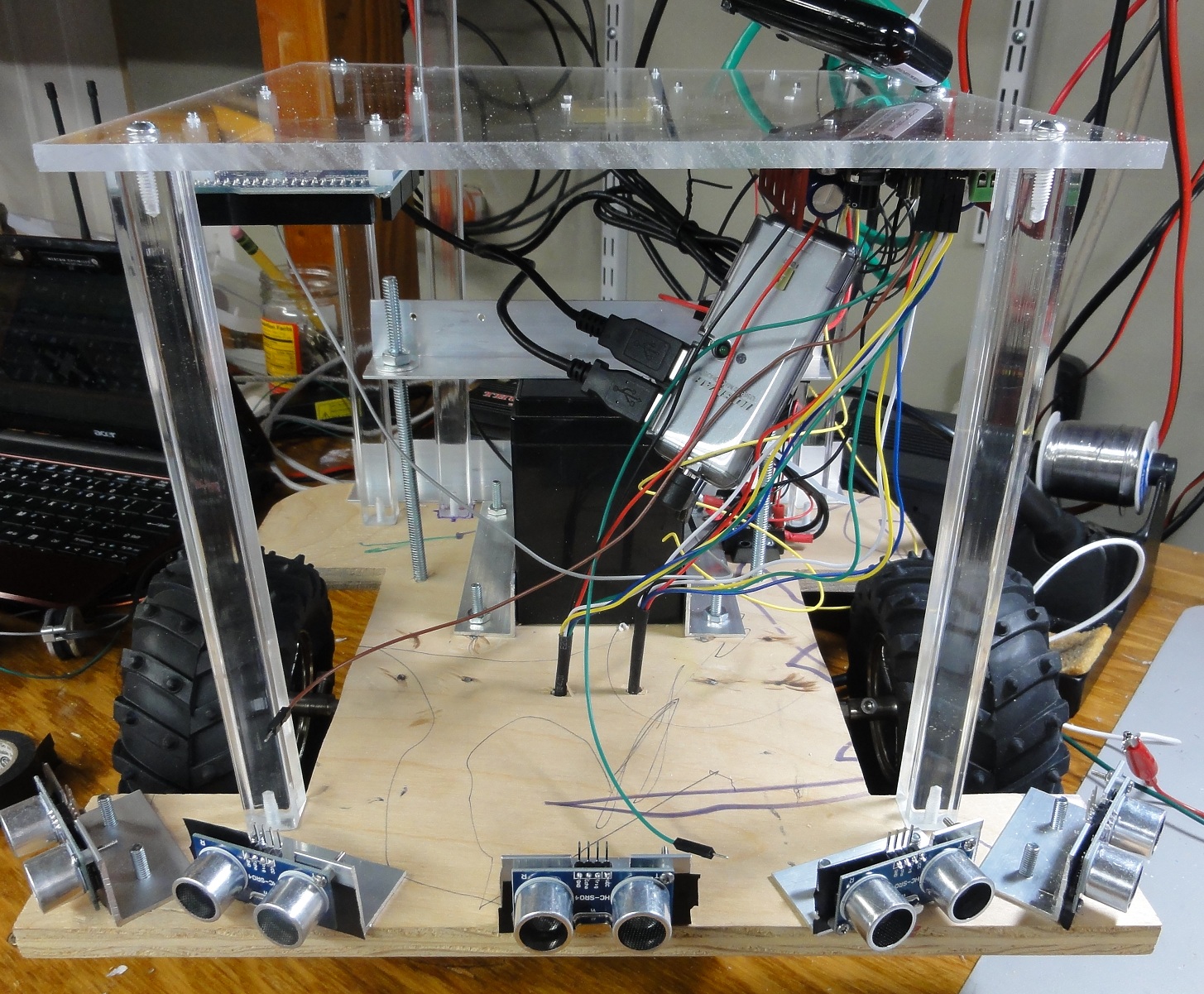
Installed the BeagleBone onto the acrylic top. Added the five front facing ultrasonic sensors. I machined the brackets myself using 1/8 inch aluminium angle pieces.

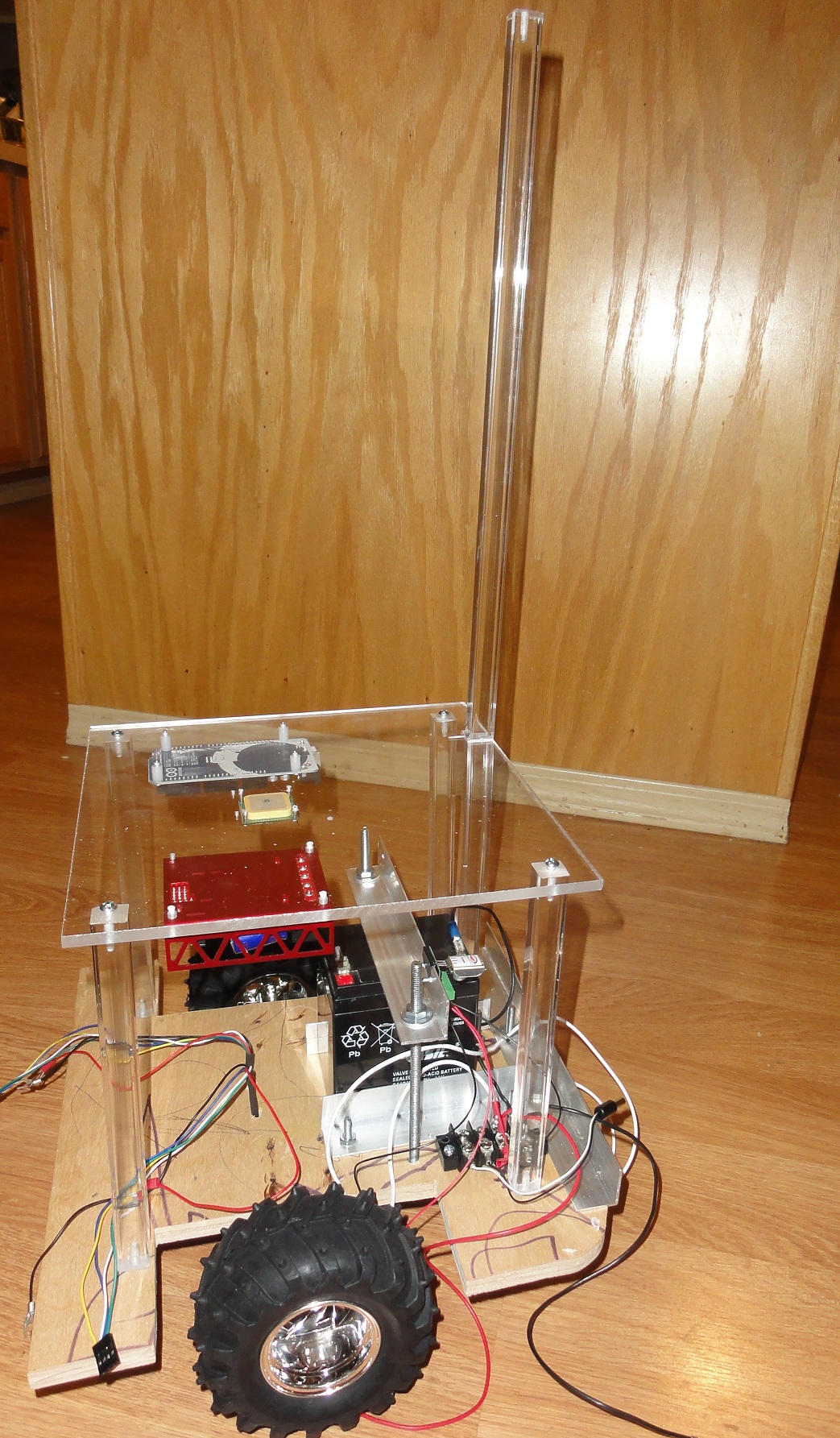
New adventures: model #7
I’ve started a new, more ambitious robotics project. This robot is targeted for outdoor use in semi-controlled settings, but with much larger range. I’ve been conceptualizing this for about six months now.
The goal is to build a platform that:
- can be used outside on pavement
- provides a wide array of sensors to navigate complex environments
- has enough computation power to play with OpenCV
- can be internet connected for rapid development (aka BeagleBone, wifi, and Python)
Using this platform I would like to play with:
- Outdoor navigation and obstacle avoidance
- OpenCV
- GPS and pre-planning algorithms
- “mission control” software
- infrastructure management
In the near term it will be built upon:
- Arduino Mega
- BeagleBone
- RoboClaw for motor control
- Pololu 37D motors with encoders
- LS20031 GPS
- CH robotics UM6 IMU
- Adafruit TTL Camera
- HC-SR04 Ultrasound sensors
- IOGear GWU627 for wifi
In the longer term:
- XBee Pro for long-range “missions”
- Solar panel charging
- “measurementation” sensor packages